RUTS-SRG
Project: Confidence-driven Robotic Ultrasound Tissue Scanning for Surgical Resection Guidance
Collaborating Departments: Department of Surgery and Cancer (Imperial); School of Computation, Information and Technology (TUM)
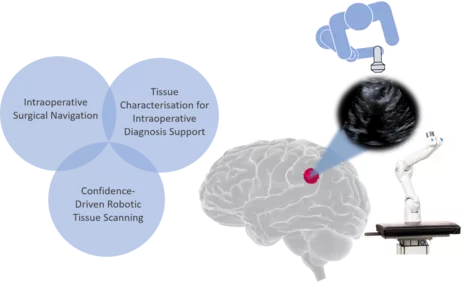
Intraoperative Ultrasound (iUS) has been established as an efficient tool for tissue characterisation during brain tumour resection in neurosurgery. It allows precise visualization of vital structures, progression of tumour resection, and management of immediate complications. It is user friendly, widely available, cost effective, and it does not require any change to theatre set up or infrastructure. However, tissue scanning requires significant training to obtain high-quality images, and the interpretation of US data remains challenging. To address these challenges, the aim of this project is to build a cognitive robotic platform for iUS tissue scanning to optimise the confidence in intraoperative tissue characterisation and improve both the efficacy and safety of tumour resections. To support intraoperative diagnosis, tumorous areas will be segmented on the iUS data and the diagnosis confidence will be estimated. To guide anatomy specific robotic scanning, fast and accurate techniques for the recovery of 3D dynamic morphological structures will be developed. The diagnosis confidence will be used in a novel fashion to guide robotic manipulations to capture the iUS view, which provides the most accurate tissue characterisation. To provide accurate tracking and interactions forces, the project will leverage the unique features of the DLR MIRO surgical robot prototypes. A key application of the proposed platform is the scanning of brain tissue to guide tumour resection but its versatile nature makes it suitable for the scanning of any organ.
The individual research objectives and corresponding publications of, both Imperial (US image quality assessment) and TUM (robotic US scanning control) PhD candidates, are mostly complete. In recent months a prototypical demonstrator was set up in the medical robotics lab at DLR (see image), with the integration of all hardware and software components completed already – including but not limited to self-made ballistic gelatine phantoms to simulate brain tissue, a customized US probe and RGB-D camera holder, automated surgical site detection and reconstruction of the tissue surface. With this demonstrator, various research directions will be investigated and challenges tackled in the future (2nd half 2023 & 2024). This opens the possibility for further joint publications, in which robot control and US imaging analysis are closely related and will interact in exciting, novel ways to develop sophisticated methods for iUS scanning for supporting brain tumour resection in neurosurgery.

Jornal Articles:
Michael Dyck, Arne Sachtler, Julian Klodmann Alin Albu-Schäffer (2022). Impedance Control on Arbitrary Surfaces for Ultrasound Scanning Using Discrete Differential Geometry. In: IEEE Robotics and Automation Letters, vol 7 (no. 3): pp. 7738-7746; DOI: 10.1109/LRA.2022.3184800. (*)
Michael Dyck, Alistair Weld, Julian Klodmann, Alexander Kirst, Luke Dixon, Giulio Anichini, Sophie Camp, Stamatia Giannarou, Alin Albu-Schäffer (2022). Collaborative robotic ultrasound tissue scanning for surgical resection guidance in neurosurgery. In: IEEE Transactions on Medical Robotics and Bionics. Submitted for publication (31st October 2022).
Conference:
- Weld, Alistair/Dixon, Luke/Anichini, Giulio/Dyck, Michael/Ranne, Alex/Camp, Sophie/Giannarou, Stamatia (2023). Automatic analysis of Ultrasound probe-tissue contact for position and pose optimisation during intraoperative tissue scanning. At: 26th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI) 2023, Vancouver, Canada. Submitted for publication (March 2023).
- Dyck, Michael/Weld, Alistair, et al. (2023). Automated robotic intraoperative ultrasound for brain surgery. Workshop contribution for Robot-Assisted Medical Imaging (ICRA-RAMI). At: International Conference on Robotics and Automation (ICRA) 2023, London, UK.
- Dyck, Michael/Weld, Alistair, et al. (2022). Collaborative Robotic Ultrasound Tissue Scanning for Surgical Resection Guidance in Neurosurgery. At: 14th Hamlyn Symposium on Medical Robotics 2022, London, UK. DOI: 10.31256/HSMR2022.46. – Finalist for Best Presentation Award
- (*) – presented at IEEE RSJ International Conference on Intelligent Robots and Systems (IROS) 2022, Kyoto – Finalist for Best Paper Award for Industrial Robotics Research for Real-World Applications
Team

Principal Investigator (Imperial)
Dr. Stamatia Giannarou
Lecturer in Surgical Cancer Technology and Imaging | Imperial

Principal Investigator (TUM)
Professor Dr. Ing. Alin Albu-Schaeffer
Chair of Sensor Based Robotic Systems and Intelligent Assistance Systems

Doctoral Candidate (Imperial)
Alistair Weld

Doctoral Candidate (TUM)
Michael Dyck