11.10 Trust between Autonomous Technical Systems (TrusTec)
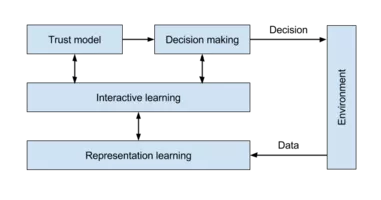
The ultimate goal for Artificial Intelligence and Robotics is to enable technical systems to adapt themselves, learn from their environment, and take decisions in concordance with specific situations, without human involvement. Specifically, cooperation between these intelligent technical systems is considered as a key factor towards such a challenge. This project aims to enhance an autonomous system to take decisions, which are influenced by a trust component between individual agents. The goal of the project is three-fold. Firstly, investigate and formalize the integration of a computational trust model in sophisticated decision making systems. Secondly, tune the parameters of the trust model by adopting the concept of system customization. For this purpose, we propose to employ reinforcement learning. Finally, explore the parameter space for the design, analysis, and deployment of interactive learning models, which is crucial for to allow for efficient learning.
Team

Project team leader
Dr.-Ing. Michael Zwick
TUM School of Computation, Information and Technology

Doctoral Researcher
Martin Gottwald
Chair of Data Processing | TUM
Doctoral Researcher
Tba.

Doctoral Researcher
Michael Moosmeier
Chair of Data Processing | TUM
Doctoral Researcher
Tba.

Principal investigator
Professor Klaus Diepold
Chair of Data Processing | TUM

Principal investigator
Professor Sandra Zilles
Computationl Learning Theory | University of Regina